모든 파라미터에 대한 gradient를 명시적으로 계산했다. (1. position 2. covariance 3. opacity 4. color)
(appendix A. 참고)
5. Optimization with Adaptive Density Control of 3D Gaussians
최종적으로는 optimization을 통해
radiance field를 잘 나타내는 3D 가우시안을 얻기 위해 아래의 parameter들을 업데이트한다.
$p$: 위치정보(positions)
$\alpha$: 투명도
$\sum$: covariance matrix
$c$: SH 기반의 color
파라미터들을 업데이트 하는 과정은 Gaussian의 density를 조절하는 것과 긴밀히 연관되어 있다. (5.2에서 자세히)
5.1 Optimization
optimization은 rendering하고 이 결과물(resulting image)을 GT 이미지와 comparing하는 과정의 연속이다.
이때 3D에서 2D로 projection하는 과정에서 잘못 positioned된 geometry가 발생될 가능성이 존재한다.
따라서 optimization을 통해,
(1) geometry를 생성하고 (2) 잘못positioned된 부분에 대해서는 geometry를 destory 혹은 move 한다.
(실험에서 사용한 detail)
SGD 알고리즘
$\alpha$: 시그모이드 활성화 함수(sigmoid activation function) 사용
0과 1의 값 사이로 제한하고, smooth gradient를 얻기 위해
$S$(scale of the covariance): 지수 활성화 함수(exponential activation function) 사용
covariance matrix의 초기값은 가장 가까운 세 점까지의 거리의 평균을 축으로 하는 이방성 가우시안(isotropic Gaussian)
Isotropic Gaussian: (특정 속성이) 방향에 따라 변하지 않는 가우시안 (구 모양) <-> Anisotropic Gaussian: (특정 속성이) 방향에 따라 변하는 가우시안 (타원체 모양)
$p$(positions): standard exponential decay scheduling 기법 사용 (plenoxel에서처럼)
loss function은 $L_{1}$과 $D-SSIM$을 합친 아래의 식 $$ L = (1-\lambda)L_{1} + \lambda L_{D-SSIM}$$ : $\lambda$는 0.2 사용
5.2 Adaptive Control of Gaussians
SFM으로부터 얻은 sparse points들을 초기값으로 시작하여
메소드를 적용해
Gaussians의 수와 단위 체적(unit volume)당 밀도 값을 조절(control)한다.
다시 말해, sparse한 Gaussians으로 시작해 scene을 더 잘 나타내는 dense한 집합으로! scene을 잘 표현하는 3D Gaussian들을 찾는 과정이라고 해석하면 좋다.
초기 warm-up 후에는
100번의 iteration마다 가우시안을 조밀하게 만들고, 주로 threshold보다 작은 투명한 가우시안을 제거한다.
(Remove Gaussian)
그리고, 빈 영역(empty area)를 채우기 위한 작업을 한다.
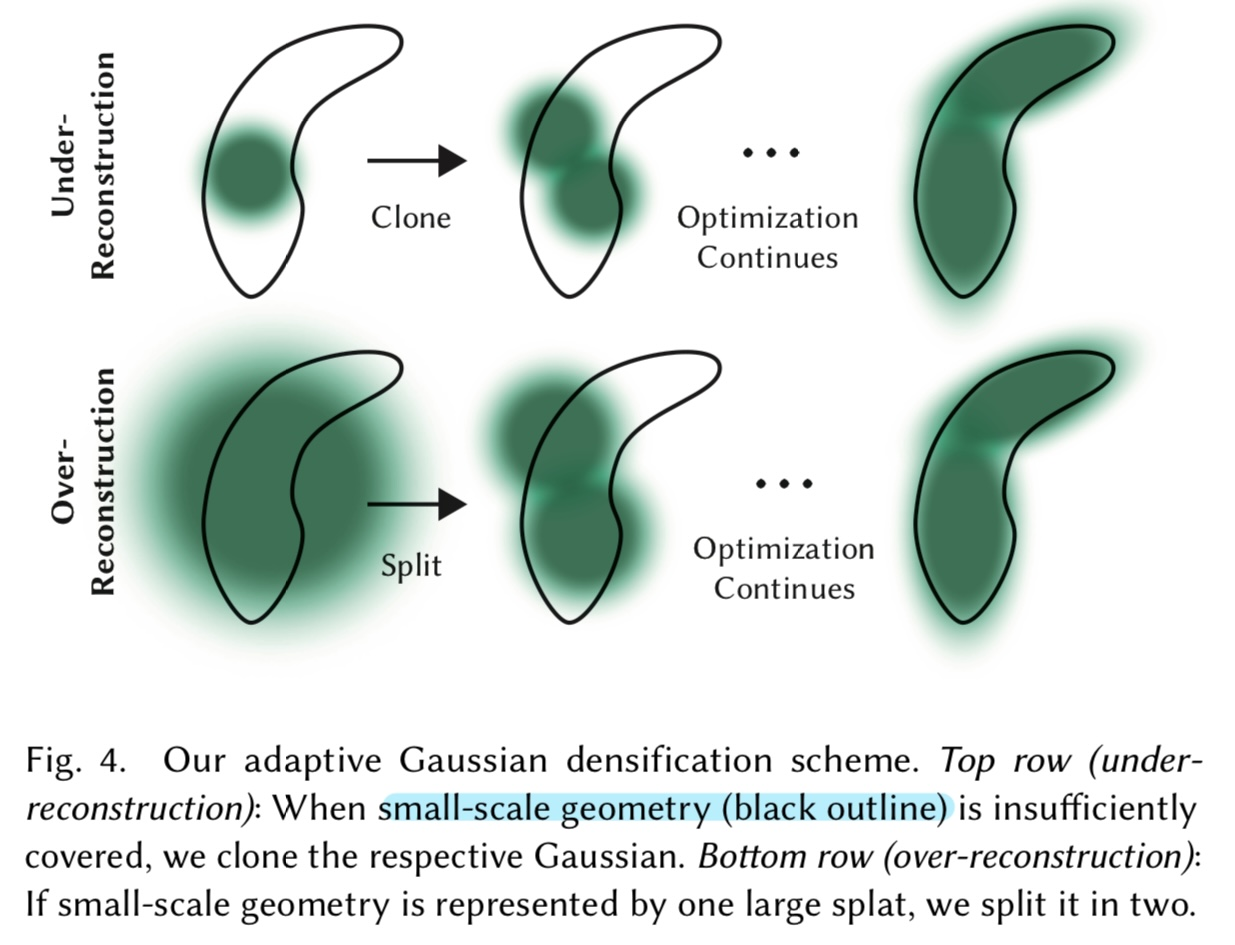
이때, under-reconstruction 부분과 over-reconstruction 부분에 집중하는데
이 두 경우 모두 view-space positional gradient가 크다는 것을 관찰된다.
under과 over 모두 잘 reconstruction되지 않았기 때문에 optimization은 이를 고치기 위해 가우시안을 move하려 한다고 생각하면 좋다.
view-space positional gradient에 대한 설명
view-space는 아래 그림처럼 카메라 기준으로 world를 바라본 공간을 의미한다. rendering된 이미지와 GT 이미지 사이의 loss값을 계산하게 되니 view-space라는 것은 충분히 이해가 간다.
positional gradient란 loss를 position에 대해 미분한 값이다. positional gradient가 크다 = loss가 크다 = 가우시안의 position 수정이 필요하다 위와 같이 해석할 수 있으므로, positional gradient가 큰 경우는 가우시안을 clone하거나 split하는 것이다.
under-reconstruction인지 over-reconstruction인지에 따라서 optimize하는 방법은 다르다.
아래 그림에서 이를 자세히 이해할 수 있다.
1. under-reconstruction된 경우
우리가 목표로 하는 geometry(검은색)보다 가우시안이 작은 경우 발생한다.
이때는 가우시안을 clone하게 되는데
(1) 동일한 사이즈의 가우시안을 생성(create)하고 (2) positional gradient 방향으로 생성된 가우시안을 이동시킨다.
(Clone Gaussian)
total volume 증가, 가우시안 수 증가
2. over-reconstruction된 경우
우리가 목표로 하는 geometry(검은색)보다 가우시안이 큰 경우 발생한다.
이때는 가우시안을 split하게 되는데
(1) 기존의 가우시안을 2개의 새로운 가우시안으로 대체(replace)하고,
(2) 새로운 가우시안의 위치는 기존의 가우시안을 샘플링하기 위한 확률밀도함수(PDF)로 초기화된다.
(Split Gaussian)
total volume 유지, 가우시안 수 증가
두 경우 모두 가우시안의 수가 늘어나기 때문에 이를 the number of Gaussians 적절히 조절하기 위해
$N=3000$일 때 투명도 $\alpha$를 0에 가까운 값으로 설정한다.
optimization과정을 통해서 $\alpha$ 값은 계속 증가할 것이기 때문에
$\alpha$값을 주기적으로 줄여줌으로써 불필요한 가우시안을 제거하는 것이다.
> 이는 퀄리티 관점에서 floater을 제거하고 중복된 가우시안을 제거하는 것과 같은 의미를 갖는다.
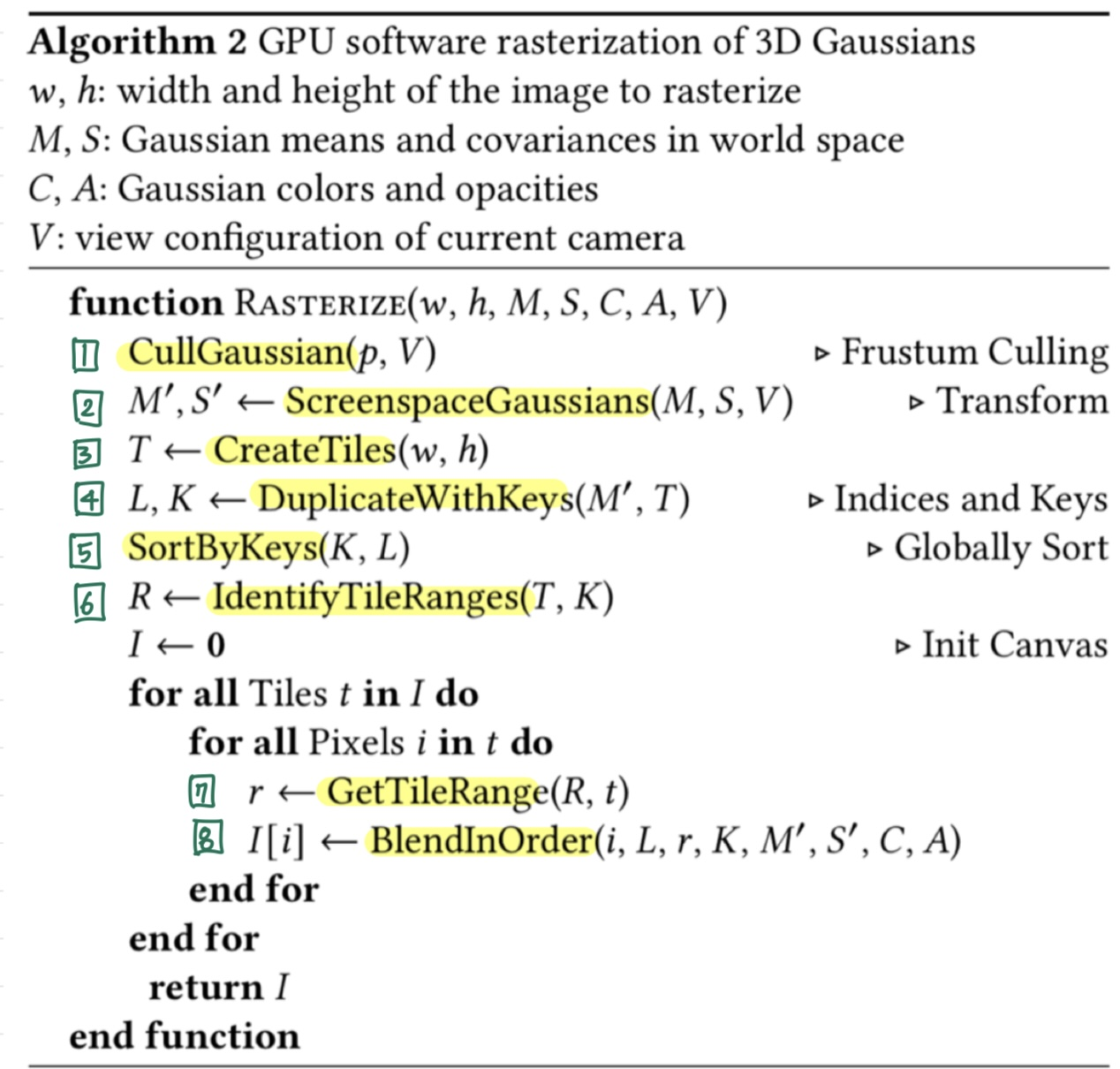
6. Fast Differentiable Rasterizer for Gaussians
본 논문의 완전 미분 가능한 rasterizer은
memory consumption이 적고, pixel당 상수 오버헤드만 필요하여
임의 개수의 혼합된 가우시안에 대한 효율적인 back propagation이 가능하게 합니다.
그럼 아래의 알고리즘을 참고하여 순서대로 설명보겠습니다.
1. 가우시안 제거 (Cull Gaussian)
카메라가 바라보는 영역인 view frustum에 없는 3D 가우시안은 모두 제거한다.
이를 판단하는 기준은, view frustum와 교차하는 부분이 99%의 신뢰구간을 가져야 한다.